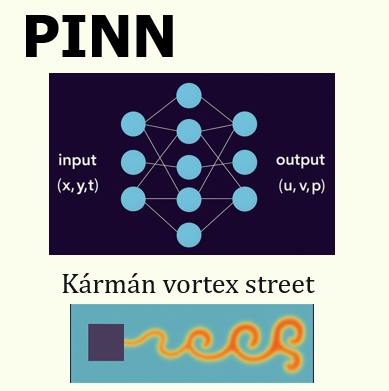
 こんにちはAX研究室のロベルト・フバチです。この投稿では、PINN(Physics-Informed Neural Networks、物理情報ニューラルネットワーク)を用いて、障害物の周囲を流れる流体のシミュレーション方法を紹介します。
こんにちはAX研究室のロベルト・フバチです。この投稿では、PINN(Physics-Informed Neural Networks、物理情報ニューラルネットワーク)を用いて、障害物の周囲を流れる流体のシミュレーション方法を紹介します。
PINNの概要については、以前の投稿の一つで紹介しました。一般的に、これらのネットワークは、自然界や産業界で発生する現象を記述する偏微分方程式を解くために使用されます。
そのような現象の一つが流体の流れであり、これは液体や気体の運動を研究する「流体力学」という分野の対象です。「流体」という用語は液体と気体の両方を指し、固体とは異なり、自由に流れたり形を変えたりする性質があります。
流体が障害物にぶつかると、その背後にカルマン渦と呼ばれる渦が発生することがあります。これらの渦は規則正しく並び、特徴的なパターンを形成します。この現象は、例えば風が旗のポールを通過する際に、旗が規則的に揺れることで観察できます。同様の渦は、島や岩の背後を流れる水、あるいは山地の周囲を流れる空気中の雲にも見られます。
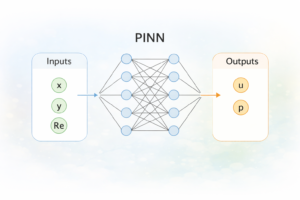
このような流れをシミュレーションするために、PINNはナビエ–ストークス方程式や連続の式などの微分方程式(図2)を利用します。たとえば、管内の層流のような単純な流れでは、これらの方程式に含まれる物理法則だけでPINNが流体の速度分布を効果的に予測できます。
しかし、カルマン渦のような非定常で非線形性の強い複雑な流れでは、従来の数値流体力学(CFD)による完全な再現は計算コストや数値安定性の観点から困難です。一方、限られた測定点での観測データのみでは、流れ場全体の詳細な把握は不可能です。PINNsはこの課題に対し、ナビエ・ストークス方程式などの物理法則を損失関数に組み込むことで、少ない観測データからでも物理的に一貫した流れ場を学習・予測することができます。具体的には、測定された速度や圧力データと物理方程式の制約を同時に満たすよう学習することで、観測点以外の領域についても信頼性の高い流れ場情報を補間・外挿できます。このように、実験データと物理モデリングを統合したアプローチにより、カルマン渦の詳細な時空間構造を効率的に把握することが可能になります。
本稿では、トレーニングデータの量や準備方法が、カルマン渦PINNモデルの精度にどのように影響を与えるかを示します。
続きを読む
 こんにちは!AX研究室のロベルト・フバチです。
こんにちは!AX研究室のロベルト・フバチです。




